Kurser: F0004T, F0006T, M0066M Förkunskaper: Vektorer och rörelse, Cirkelrörelse
1. Position i polära koordinater
Det polära koordinatsystemet beskriver en punkt i planet med två tal: avståndet till origo och vinkeln från positiva -axeln, mätt moturs.
Omvänt får vi tillbaka de kartesiska koordinaterna ur
Grundtanken
Polära koordinater är det naturliga språket för rörelse som har en föredragen punkt — origo. Allt som handlar om avstånd till en punkt eller vridning kring en punkt blir mycket enklare än med kartesiska .
Singulariteten i origo
I origo är vinkeln obestämd: alla värden ger samma punkt. För kartläggningar mellan polärt och kartesiskt brukar man tillåta detta som en mängd med area noll — utanför origo är bytet bijektivt.
2. Den rörliga basen
Varje punkt i planet har sin egen lokala bas: en enhetsvektor som pekar radiellt utåt från origo, och en enhetsvektor som pekar transversellt (90° moturs från ).
Den polära basen är rörlig
Till skillnad från kartesiska — som pekar likadant överallt — ändras och från punkt till punkt. Det är just denna rörlighet som ger upphov till de “extra” termerna i hastighet och acceleration nedan.
Basen är fortfarande ortonormerad i varje punkt: och .
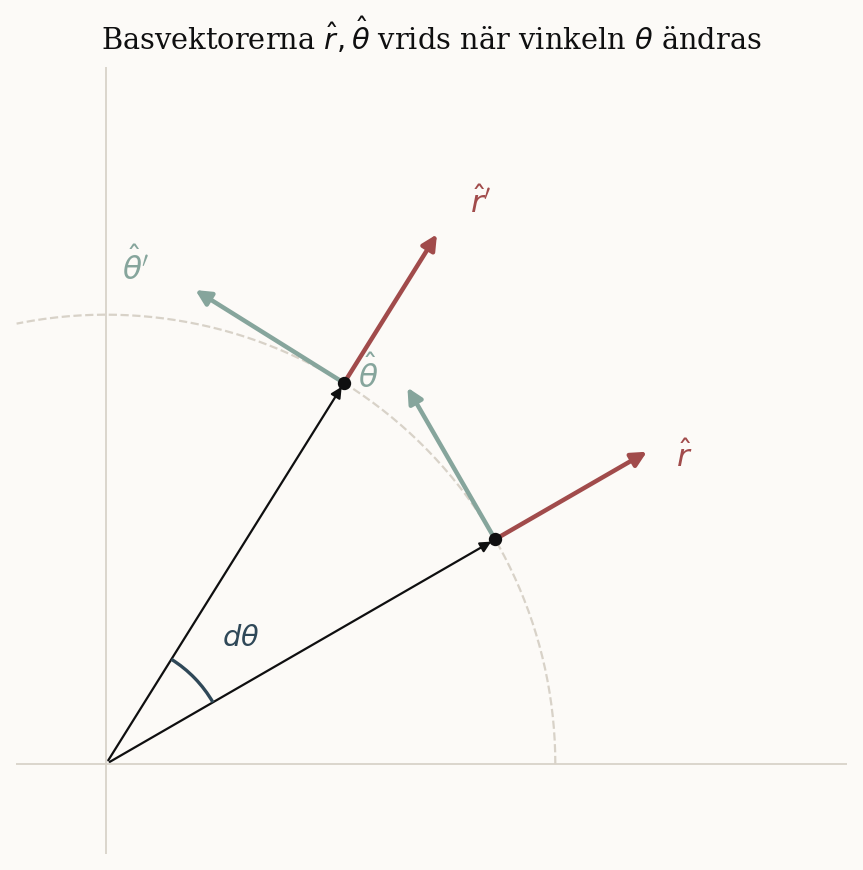
3. Hur basen ändras i tiden
Eftersom och beror på , och kan bero på tiden, så ändras basvektorerna när partikeln rör sig. Deriverar man uttrycken i §2 med kedjeregeln får man
Bilden nedan visar tanken: när partikeln rör sig från en punkt med vinkel till en med vinkel , vrids hela basen med vinkeln . Ändringen är en vektor vinkelrät mot — alltså längs .
Snabb minnesregel
Bägge derivator är “rotation med vinkelhastighet i moturs riktning”:
- vrids åt -hållet .
- vrids åt -hållet .
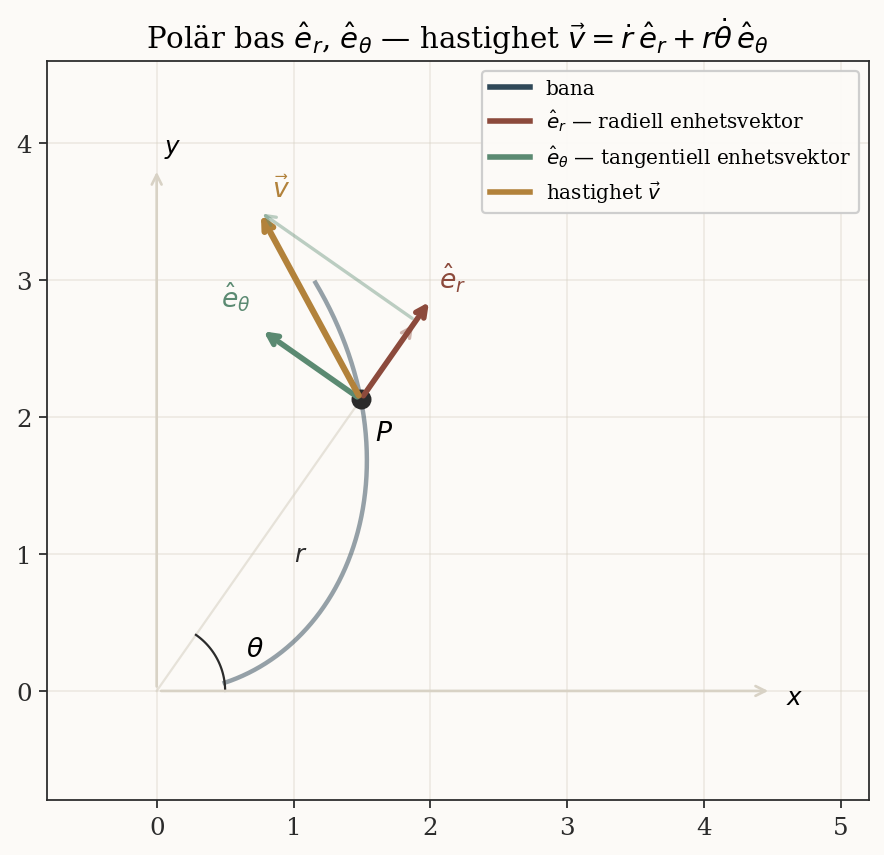
4. Hastighet
Positionsvektorn till en partikel kan skrivas . Tidsderivering med produktregeln, plus , ger
| Term | Namn | Tolkning |
|---|---|---|
| radiell hastighet | hur snabbt avståndet till origo ändras | |
| transversell hastighet | hur snabbt partikeln “svänger runt” origo |
Båglängdsperspektivet
Faktorn i kommer av att en liten vinkeländring vid avstånd svarar mot båglängden . Vid större ger samma vinkelhastighet en större tangentiell fart — precis som ett barn längst ut på en karusell rör sig fortare än ett som sitter nära mitten.
5. Acceleration
Deriverar man en gång till — och håller koll på att även och deriveras — får man
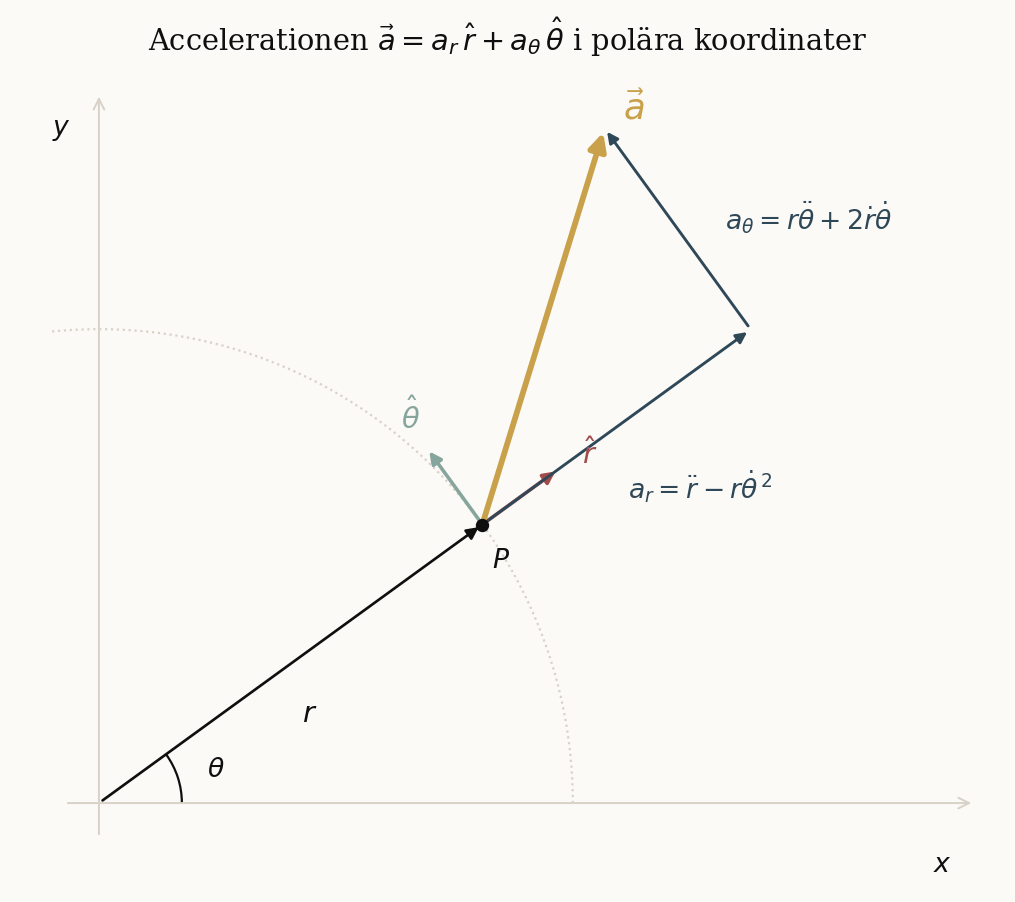
Komponentvis:
De fyra termerna och vad de betyder
Term Namn Vad den fångar ren radiell acceleration partikelns avstånd till origo accelererar centripetalterm krökning av banan; pekar inåt (negativt ) tangentiell vinkelacceleration rotationen kring origo snabbas på/bromsas Coriolisterm uppstår när både och ändras samtidigt
Specialfall: likformig cirkelrörelse
Sätt (konstant), så , och (konstant), så . Då blir
där vi använt . Detta är precis centripetalaccelerationen — minustecknet säger att den pekar in mot origo. Bra sanity-check: kinematiken i polära koordinater måste ge samma svar som specialfallet.
6. Räkneexempel: bilen på en rak väg
Det enda stället polära koordinater dyker upp i F0006T-proven är polisradar-problemet. Det finns i två sifferversioner men löses exakt likadant, och hela lösningen vilar på en enda mening i uppgiften: bilen kör på en rak väg. Utan den meningen är problemet olösbart; med den blir det rättframt. Läs därför hela det här avsnittet som en enda lång motivering av varför man får göra det man gör — räkningen i exemplen är sedan bara att fylla i siffror.
Mätvärdena räcker inte i sig — det är därför vägen måste vara rak
Radarn rapporterar bara fyra kinematiska tal: och (plus massan ). Men accelerationsformeln
innehåller även och — två storheter vi inte fått. Att bara sätta dem till noll vore att hitta på fysik och ger fel svar. Det som räddar oss är att banan är känd: en rak linje. En känd bana binder ihop och , och därmed också alla deras derivator. Det är den bindningen som levererar de två saknade talen.
Den bärande idén: en känd bana är ett tvång, och ett tvång får deriveras
Jämför en fri partikel med en pärla trädd på en ståltråd. Den fria partikeln kan ha vilken kombination som helst av de sex talen — de är oberoende. Pärlan på tråden är låst: så fort vi vet var på tråden den är (säg vinkeln ) är bestämt; då är låst till , och låst till och . Bilen på den raka vägen är pärlan, och vägen är tråden. Vi skriver tråden som en ekvation som gäller vid varje ögonblick bilen rullar — och just därför får vi derivera den i tiden: en likhet som alltid är sann har en tidsderivata som också alltid är sann. Varje derivering knyter ihop en ny derivata, och så fyller vi luckorna och .
6.1 Trådens ekvation:
Polisradarn står inte på vägen utan vid sidan av den, på det vinkelräta avståndet till vägbanan. Det avståndet ändras aldrig — radarn flyttar sig inte och vägen är rak. Det är hela tvånget, och vi läser av det direkt ur figuren.
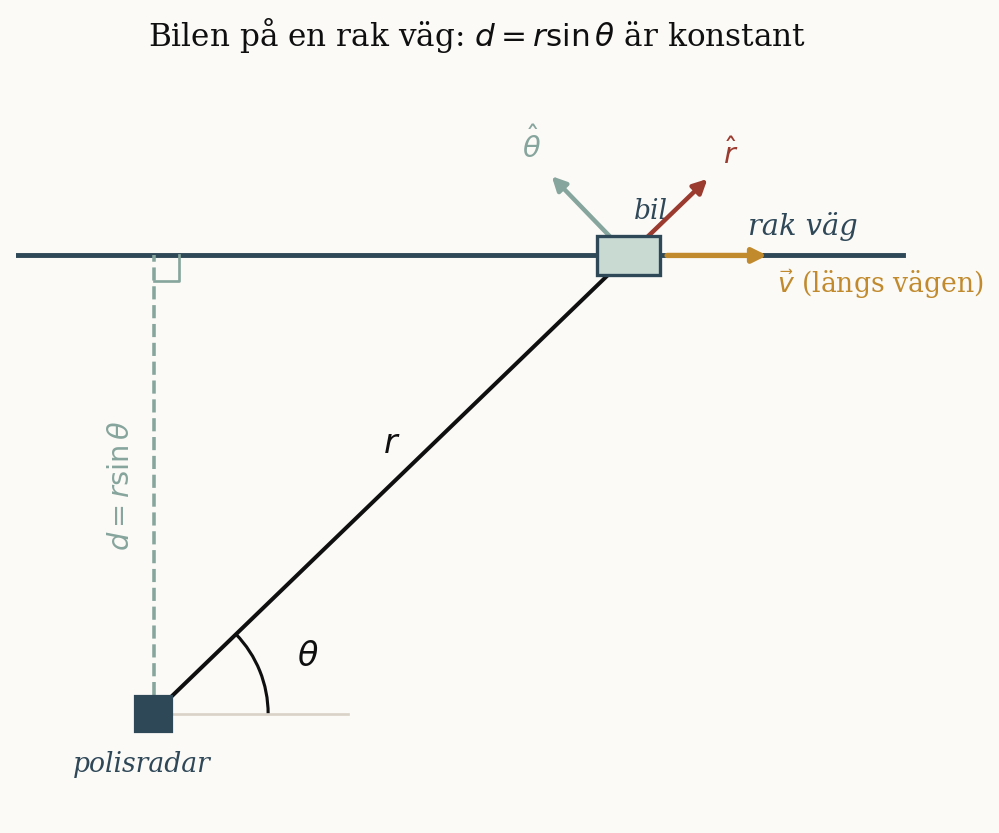
Titta på den rätvinkliga triangeln: radarn i ett hörn, bilen i ett annat, och fotpunkten (där det vinkelräta avståndet möter vägen) i det tredje. Hypotenusan är synlinjen , och är vinkeln mellan synlinjen och själva vägen. Kateten som står vinkelrät mot vägen är då — men den kateten är per definition det vinkelräta avståndet till vägen. Alltså:
Lägg märke till vad betyder här: vinkeln mäts från vägens riktning. När bilen är långt borta löper synlinjen nästan parallellt med vägen och är litet; när bilen är rakt för om radarn (närmaste punkten) är synlinjen vinkelrät mot vägen och ; när bilen sedan avlägsnar sig minskar igen.
Allt som följer ärver antagandet "rak väg"
Det är enbart för att vägen är rak som är samma tal vid alla tidpunkter. Vore vägen krökt skulle det vinkelräta avståndet till radarn variera, högerledet vore inte längre en konstant, och derivatorna nedan skulle få extra okända termer — då går problemet inte att lösa med enbart radarns fyra tal. Varje steg i §6.1 och i båda exemplen lutar sig mot denna enda förutsättning. Stryk “rak väg” och hela metoden faller.
Steg 1 — derivera tråden en gång; det ger . En storhet som är konstant i tiden har tidsderivatan noll. Derivera vänsterledet med produktregeln (både och beror på tiden):
Detta är inte en formel att memorera utan ett villkor med en fin tolkning: de två sätten avståndet till vägen kan ändras på — genom att växer (ger ) eller genom att vinkeln vrids (ger ) — tar alltid ut varandra exakt, så att summan blir noll och bilen aldrig lämnar vägen. Löser vi ut den radiella farten:
Den okända är nu uttryckt i de mätta talen . Det är rak-väg-antagandets första utdelning: en av luckorna är fylld utan att vi behövt mer mätdata.
Steg 2 — derivera tråden en gång till; det ger . Villkoret är också sant vid varje tidpunkt, så även det får deriveras i tiden. Produktregeln på var och en av de två termerna:
De två likadana -termerna slås ihop till en faktor (samma struktur som Coriolistermen längre upp — det är ingen slump, det är produktregeln på ett blandat -uttryck):
Nu är den enda obekanta kvar: är mätta och kom från steg 1. Lös ut den:
Därmed har vi alla sex polära storheter. Notera särskilt att i allmänhet inte är noll — den raka vägen tvingar fram en bestämd vridningsacceleration kring radarn, och just därför är det ett fel att slentrianmässigt anta .
Steg 3 — nu, och först nu, accelerationsformeln. Poängen med steg 1–2 var att fylla luckorna och . Med dem på plats är resten ren insättning i den vanliga polära kinematiken, följt av Newtons andra lag:
En oberoende sluttest: accelerationen ligger längs vägen
Eftersom en rak väg har krökning noll får varken hastigheten eller accelerationen någon komponent vinkelrät mot vägen — båda vektorerna pekar längs vägbanan. Det ger en gratis kontroll: räknar man om och till -komponenter ska de bli parallella. Är de det vet man att steg 1–2 är rätt; är de det inte har tvånget hanterats fel. Detta är samma fysik som konstant, sedd från andra hållet.
Exempel 1 — Polisradar (F0006T, tenta 2022-03-27 / 2025-06-04)
En bil kör förbi en polisradar på en rak väg. Vid en viss tidpunkt mäter radarn
Beräkna beloppet av nettokraften på bilen om dess massa är .
Lösning Innan vi rör en siffra: vad gör problemet lösbart? Radarn ger oss — men behöver också och . De två saknade talen kommer uteslutande från att vägen är rak, via tvånget (§6.1). Vi följer därför de tre stegen därifrån. Varenda rad nedan förutsätter den raka vägen; vore vägen krökt skulle uppgiften sakna entydigt svar.
Förberedelse — trigvärden vid . , , och . Dessa tre dyker upp i varje steg, så vi beräknar dem en gång.
Steg 1 — radiell fart ur . Detta är första derivatan av tvånget, utlöst för :
Tecknet bär fysik. betyder att avståndet till radarn växer: bilen har redan passerat sin närmaste punkt och kör nu därifrån. Det rimmar med att — vinkeln mot vägen krymper tillbaka mot noll allteftersom bilen avlägsnar sig. Hade vi (felaktigt) antagit hade vi påstått att bilen inte närmar sig eller fjärmar sig radarn alls, vilket är orimligt mitt under en passage.
Steg 2 — vinkelacceleration ur andra derivatan av tvånget. Vi behöver centripetalfaktorn . Sätt in i den utlösta formeln för , term för term:
(Mittersta termen byter tecken: ett minus framför ett negativt tal blir plus.) Att är inte ett fel utan precis vad den raka vägen kräver — bilen måste vrida sig kring radarn i en bestämd takt för att hålla sig på linjen. Detta är talet den naiva lösningen slarvar bort genom att gissa .
Steg 3 — sätt ihop accelerationen. Nu finns alla sex storheter, så vi använder den vanliga polära formeln:
Radiellt bidrar både den rena och centripetaltermen (som drar inåt). Transversellt dominerar Coriolistermen — den är stor just för att bilen samtidigt har stor radiell fart (steg 1) och vrider sig (stor ).
Belopp och kraft. och är vinkelräta, så beloppet ges av Pythagoras — inte av summan av komponenterna:
Rimlighetskoll via farten. Det bästa testet på att vi inte tappat en faktor är att räkna ut bilens fart. Med och :
En fullt normal vägfart. Att betyder dessutom att farten är jämnt fördelad mellan radiell och transversell led — precis vad man väntar sig när synlinjen lutar ungefär mot vägen och hela rörelsen ändå sker längs vägen.
Exempel 2 — Polisradar med andra siffror (F0006T 2024-08-27 / 2025-08-26)
Samma raka väg, nya mätvärden:
Lösning varför-frågan redan är besvarad i §6.1 och i Exempel 1 går vi här något snabbare genom räkningen — men varje siffra kommer fortfarande ur exakt samma tvång . Tar man bort den raka vägen försvinner och , och uppgiften blir olösbar.
Samma raka väg, samma tre steg. Eftersom
Förberedelse — trigvärden vid . , , .
Steg 1 — radiell fart (första derivatan av tvånget).
Återigen : bilen har passerat och avlägsnar sig.
Steg 2 — vinkelacceleration (andra derivatan av tvånget). Med :
Steg 3 — komponenter, belopp, kraft.
Rimlighetskoll. — återigen en rimlig vägfart, vilket bekräftar räkningen.
Sammanfattning: vad antagandet "rak väg" gör för oss
Båda tentauppgifterna ser ut som rena insättningsproblem, men radarn ger bara fyra kinematiska tal medan accelerationen behöver sex. Det är den raka vägen — och bara den — som fyller gapet:
- Rak väg det vinkelräta avståndet är konstant i tiden.
- Derivera en gång (annars okänd).
- Derivera två gånger (annars okänd; i synnerhet inte noll).
- Först därefter i polära koordinater, sedan .
Det vanliga, naiva felet är att hoppa direkt till steg 4 och gissa och . Då försvinner hela fysiken i problemet, och svaret blir bara rätt av en slump om gissningen råkar matcha tvånget. Lär dig kedjan “rak väg derivera tvånget accelerationsformeln”, inte siffrorna.
Vanliga fallgropar
- Hittat på eller satt . Mätvärdena innehåller inte och — de måste räknas fram ur rak-väg-villkoret. Att gissa är fysikaliskt fel: en rak väg tvingar fram en bestämd .
- Glömt centripetaltermen . Att skriva stämmer bara om bilen inte vrider sig kring radarn.
- Glömt Coriolistermen . Faktorn kommer från produktregeln i derivationen.
- Räknat . Komponenterna är ortogonala — det är Pythagoras som gäller: .
7. Sammanfattning
| Storhet | Uttryck i polära koordinater |
|---|---|
| Position | |
| Hastighet | |
| Acceleration | |
| Basvektorernas tidsderivator |
Metodikchecklista
När en uppgift ger mätvärden i polära koordinater:
- Räkna mätvärdena. Får du alla sex storheter ? Om någon saknas finns ett tvångsvillkor (t.ex. rak väg, ) som ska deriveras för att få de saknade derivatorna — gissa aldrig.
- Sätt upp formeln för eller symboliskt först — så ser man vilka mätvärden som behövs.
- Beräkna och komponentvis. Var noga med teckenkonventioner: betyder att partikeln närmar sig origo, betyder vridning medurs.
- Ortogonalt belopp: .
- Newton avslutar: .
- Sanity-check mot specialfall (cirkelrörelse, ren radiell rörelse) eller via farten .
Läsning
- M2 Polära koordinater — F0006T:s primära kursunderlag (Lehto)
- 8.5 Polar Coordinates and Polar Curves — grundläggande geometrisk introduktion (Adams)
- 12.6 Polar Components of Velocity and Acceleration — härledning av samma formler i kalkylböckernas språk
- 3 Motion in Two or Three Dimensions — Young & Freedman om allmän 2D-kinematik
Se även
- Cirkelrörelse — specialfall där är konstant
- Vektorer och rörelse — kartesiska motsvarigheter till samma kinematik
- Variabelbyte i dubbelintegraler — polära koordinater som integrationsverktyg ()
- Polär form för komplexa tal — samma koordinater, andra tillämpning
Resurser
- Khan Academy: Polar coordinates — kort introduktion
- Wikipedia: Polar coordinate system
- MIT OCW 8.01 — Lecture on motion in 2D — kompletterande genomgång av vektorkinematik