Kurs: F0006T Förkunskaper: Rotationsmekanik, Newtons lagar, Arbete och kinetisk energi
1. Idén bakom tröghetsmomentet
Newtons andra lag säger oss att massan är ett mått på hur svår en kropp är att accelerera translatoriskt. När vi går över till rotation kring en axel behöver vi en motsvarande storhet — något som säger hur svår kroppen är att vinkelaccelerera. Det är tröghetsmomentet .
Grundtanken
Tröghetsmomentet förhåller sig till rotation precis som massan förhåller sig till translation. Skillnaden är att inte bara beror på hur mycket massa kroppen har, utan också på var massan sitter i förhållande till rotationsaxeln.
Det innebär två viktiga saker:
- En kropp har inte ett enda tröghetsmoment — det beror på vilken axel man väljer.
- Massa långt ifrån axeln “räknas” mer än massa nära axeln. Faktorn är kvadratisk: dubbelt avstånd ger fyra gånger så stort bidrag.
Två frågor som alltid måste besvaras först
- Vilken axel arbetar vi med?
- Vilken kropp / vilken massfördelning arbetar vi med?
Glömmer man någon av dessa blir tröghetsmomentet meningslöst — det är inte en egenskap hos kroppen ensam, utan hos paret (kropp, axel).
2. Härledning från rotationsenergi
Den naturligaste vägen in till går via rörelseenergin för en stel kropp som roterar kring en fix axel.
Dela upp kroppen i små bitar med massor på vinkelräta avstånd från rotationsaxeln. Eftersom kroppen är stel har alla bitar samma vinkelhastighet . Den tangentiella farten för bit är då
Bit :s rörelseenergi är . Summera över alla bitar:
Parentesen är en egenskap som bara beror på massfördelningen i förhållande till axeln — inte på rörelsen. Den får ett eget namn:
Med detta får rörelseenergin den kompakta formen
Direkt analogi
Jämför med translation: . Bytet och ger rotationsversionen. Samma analogi fungerar för momentekvationen (, , ) — se Momentekvationen.
3. Tröghetsmoment för kontinuerliga kroppar
För en kontinuerlig kropp ersätter vi summan med en integral. Bidraget från ett massement på avståndet från axeln är , så
Vid konstant densitet kan flyttas in och kan brytas ut:
För kroppar med plan symmetri (skivor, ringar, stänger) reduceras volymsintegralen ofta till en enkel- eller dubbelintegral över genomskärningens area.
är vinkelrätt avstånd till axeln
Inte avstånd till origo, inte radievektorns längd. Det är specifikt det vinkelräta avståndet från massementet till rotationsaxeln. För en stång som roterar kring sin egen längdaxel är avståndet ut till stångens yta — inte längs stången.
4. Geometrisk tolkning
Eftersom bidraget från en bit massa skalar som är massa långt från axeln mycket viktigare än massa nära axeln. Det är hela poängen med tröghetsmomentet — och förklarar varför samma kropp med samma massa kan ha helt olika tröghetsmoment beroende på hur massan är fördelad.
Demo — två stänger med samma massa, olika fördelning
Två 0,5 m långa aluminiumrör, båda med försumbar egenmassa. På varje rör sitter två vikter à kg. På rör 1 sitter vikterna nära mitten; på rör 2 sitter de i ändarna.
Rotation kring centrum (cm):
Rotation kring ena änden (med Steiners sats, se §5):
Trots att stängerna har samma totala massa skiljer sig deras tröghetsmoment med en faktor flera. Rör 2 är märkbart trögare att sätta i rotation — testa själv om du har två sådana stavar tillgängliga, det är en ovanligt övertygande klassrumsdemonstration.
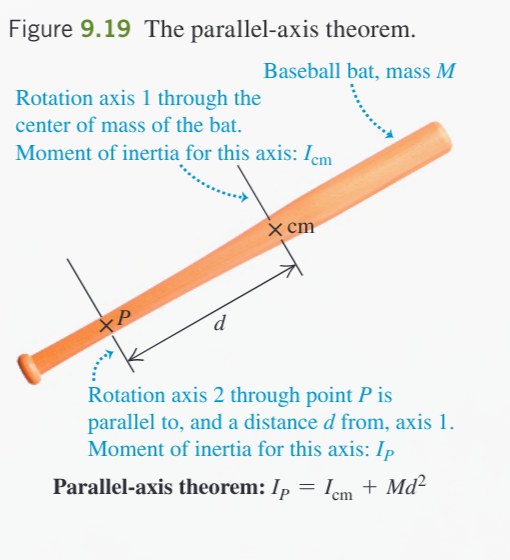
5. Steiners sats (parallellaxelsatsen)
Det är ofta enkelt att räkna ut tröghetsmomentet kring en axel genom masscentrum, men problemet ber oss om en annan parallell axel. Steiners sats är genvägen.
Steiners sats
Låt vara tröghetsmomentet kring en axel genom masscentrum, och låt vara en parallell axel på avståndet . Då är
där är kroppens totala massa.
Två observationer:
- Bidraget är alltid positivt. Det betyder att är det minsta tröghetsmomentet för någon axel parallell med en given riktning — flytta axeln bort från cm och kan bara öka.
- Satsen kräver att axlarna är parallella. För roterade axlar krävs den fulla tröghetstensorn, vilket vi inte rör i den här kursen.
Praktisk användning
Steiners sats används typiskt åt två håll:
- “Flytta in till cm.” Du har kring en kant och vill ha det kring cm: .
- “Flytta ut från cm.” Du har från en tabell och vill ha kring en lämplig kant eller momentancentrum: .
6. Tröghetsradie
Det är ofta praktiskt att rapportera tröghetsmomentet inte som en talvärde, utan som en karakteristisk längd — den tröghetsradie som en motsvarande tunn cylinderhylsa skulle behöva ha för att ge samma :
Tröghetsradien har dimensionen längd och säger något geometriskt om var massan sitter i förhållande till axeln. Den används flitigt i konstruktionssammanhang (svänghjul, hjulupphängning) där man vill beskriva “hur fördelad” en kropps massa är utan att lista hela :n.
7. Sammansatta kroppar
Eftersom tröghetsmomentet definieras som en integral är det additivt över rumsligt åtskilda delar. Är kroppen sammansatt av delar med tröghetsmoment kring samma axel, så är totala tröghetsmomentet
Härledningen följer direkt från definitionen:
Två viktiga tekniker faller ut:
- Subtraktionstrick. Vill du beräkna för en kropp med ett hål? Räkna för den fulla kroppen och dra av för det fiktiva fyllnadsmaterialet i hålet. Båda termerna kan tas från standardtabeller.
- Symmetritrick. Är kroppen symmetrisk så att två delar bidrar lika mycket, räcker det att räkna ena halvan och dubbla.
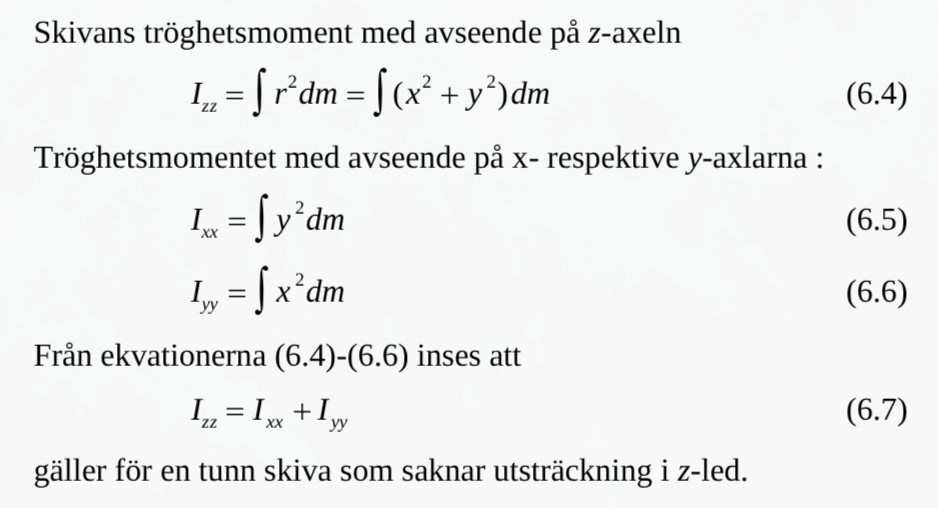
8. Tunna skivor
Tunna plana kroppar har en användbar specialregel: vinkelaxelsatsen (perpendicular axis theorem).
Vinkelaxelsatsen (endast plana kroppar)
Ligger kroppen i -planet och låter vi -axeln vara vinkelrät mot planet, så är
där alla tre axlar går genom samma punkt.
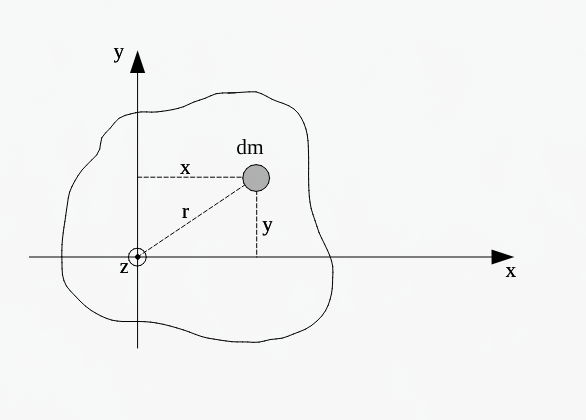
Bevisidén är enkel: för en punkt i planet är avståndet till -axeln , dvs. summan av de vinkelräta avstånden till - och -axlarna i kvadrat. Integrerar man bidragen över skivan så summeras integralerna direkt.
 skapas
skapas
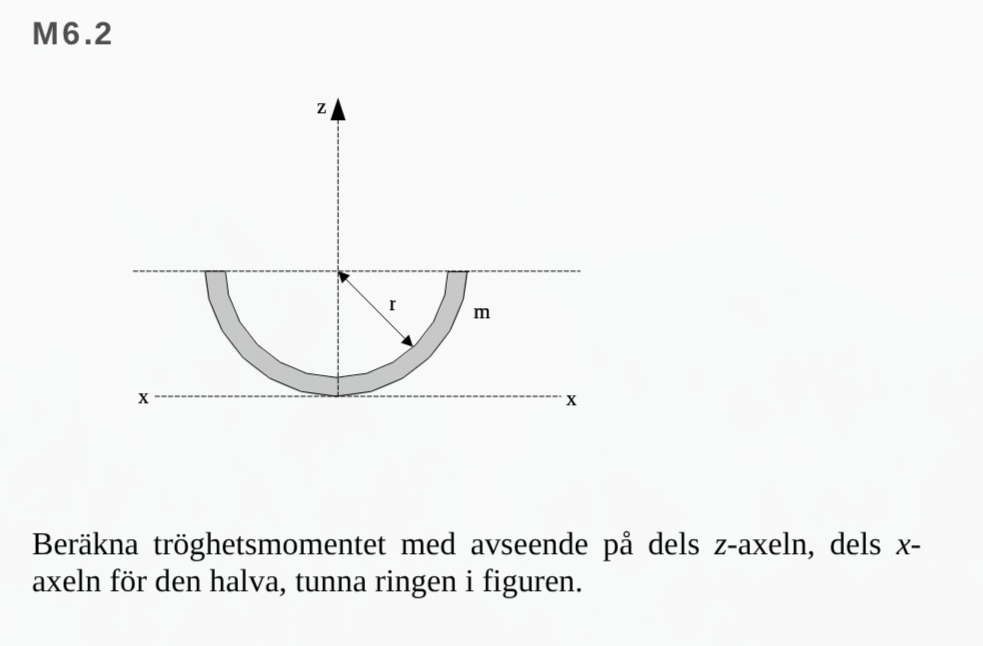
M 6.2 — halvskiva
En halv homogen cirkelskiva med radie och massa .
Facit a) Tröghetsmoment kring symmetriaxeln (vinkelrät mot skivan, genom centrum):
Skriv halvskivan som en full skiva minus den andra halvan. Av symmetri har båda halvorna samma , så
För en full homogen skiva ger Fysika Tf-1b/c: — men här är den fulla skivans massa, inte halvans, så vi får
b) Tröghetsmoment kring en axel längs den raka kanten:
Använd Steiners sats för att flytta axeln från cm ut till kanten (avstånd för halvskiva).
9. Sammanfattning och metodik
Hur man tar fram tröghetsmomentet i ett problem
- Identifiera axeln. Vilken är rotationsaxeln? Är den fix, går genom cm, eller momentancentrum?
- Identifiera kroppen. Är den homogen? Sammansatt av enkla delar? Har den ett hål?
- Slå upp eller härled. Sök i Fysika eller Adams, eller använd direkt om kroppen är enkel.
- Använd Steiners sats för att flytta axeln om det behövs.
- Använd vinkelaxelsatsen om kroppen är plan och axeln är vinkelrät mot planet.
- Summera över delar för sammansatta kroppar (eller subtrahera, för hål).
| Storhet | Translation | Rotation kring fix axel |
|---|---|---|
| Tröghet | (massa) | (tröghetsmoment) |
| “Hastighet" | ||
| "Acceleration" | ||
| "Kraftmotsvarighet” | ||
| Rörelseenergi | ||
| Rörelsemängd |
Vanliga fallgropar
- Glömt parallellaxelsatsen när axeln ligger en bit från cm.
- Använt fel : är vinkelräta avståndet till rotationsaxeln, inte radievektorns längd.
- Antagit konstant densitet utan motivering — kontrollera om kroppen är homogen innan bryts ut.
- Adderat tröghetsmoment kring olika axlar. Additivitet kräver samma axel.
Tillämpningar — utförda exempel
Exempel A — trissa, två lastfall
En trissa (homogen skiva, radie , massa , ).
- Fall 1: En lina hänger över trissan. På linan hänger en massa som drar medurs.
- Fall 2: Linan dras direkt med kraften medurs (ingen hängande massa).
Vad är skillnaden? Vilket koordinatsystem är lämpligt?
Lösning -koordinater för trissan. Använd kartesiskt koordinatsystem för den hängande massan, kombinerat med momentlagen kring trissans masscentrum.
Eftersom trissan roterar kring sitt egna masscentrum följer ingen fix punkt på kanten en cirkelbana med konstant radie i rummet — alltså inte
Fall 1 — hängande massa : Linans spännkraft är . Rullning utan glidning ger .
NII för (positivt nedåt):
Momentlagen för trissan kring cm:
Insatt:
Fall 2 — direkt kraft : Endast trissan accelereras. Momentlagen kring cm:
Skillnad: . I fall 1 måste även den hängande massan accelereras, så samma drivande tyngd måste fördelas över båda trögheterna. I fall 2 verkar kraften enbart på trissan. Notera också att i fall 1 är — annars skulle massan inte falla.
Exempel B — jojo (tenta 190320)
En jojo (homogen skiva, massa , radie , ) faller med acceleration nedåt. En kraft verkar i linans fäste — punkten längst åt höger på jojon — och drar uppåt. Sök , och (tangentialaccelerationen i punkt ).
Lösning .
Linan är vertikal; rullning utan glidning på linan ger
Metod 1 — kring masscentrum (gängse val):
NII vertikalt (positivt nedåt):
Momentlagen kring cm:
Insatt:
Metod 2 — kring momentancentrum : Eftersom linan inte glider är momentancentrum (), så momentlagen är giltig där (en av de få fallen där den får användas kring en icke masscentrum-punkt). Använd Steiners sats: Endast tyngden ger moment kring (kraften angriper i och har inget moment där):
Tangentialacceleration i : är momentancentrum, så dess totala acceleration är vertikal (samma som hela jojons fall). Tangentialdelen — relativt cm — kompenserar exakt jojons fallacceleration, vilket är precis vad rullningsvillkoret kräver:
Poängen fix axel, masscentrum eller momentancentrum. Här ger valet ett enklare ekvationssystem än kring cm, eftersom kraften försvinner ur momentekvationen.
Momentlagen kan ställas upp kring
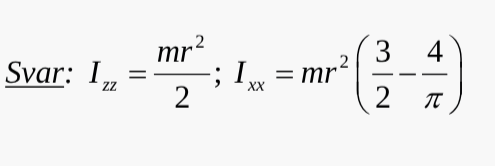
Exempel C — halvklot kring fix diameteraxel ( M 7.3 i kompendiet)
Ett halvklot med massa och radie släpps från vila i läget och roterar fritt i vertikalplanet kring den fixa axeln (diametern i den plana sidan). Härled n- och t-komposanterna av kraften från axeln på halvklotet som funktion av .
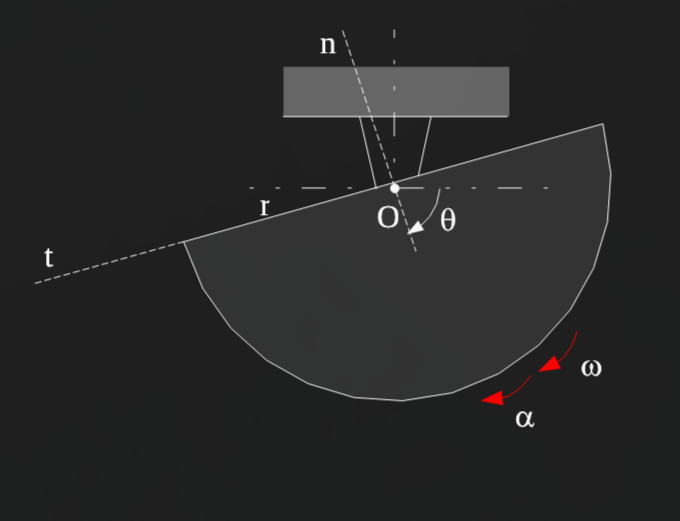
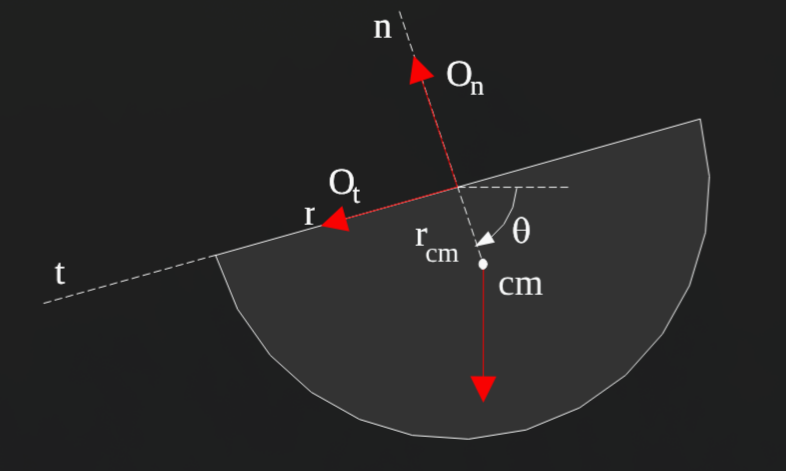
Friläggning för godtycklig vinkel :
Lösning Geometri och tröghetsmoment:
- Avstånd cm:
- Tröghetsmoment kring (diameteraxel i den plana ytan):
Steg 1 — via mekaniska energisatsen: Vid ligger axeln cm horisontellt. Vid vinkeln (mätt nedåt från horisontell) har cm sjunkit höjden .
Steg 2 — vinkelacceleration via momentlagen kring : Tyngden har hävarmen kring :
Steg 3 — acceleration av cm: I -system med från mot cm (positivt utåt) och i rörelseriktning:
Steg 4 — NII för cm, uppdelat i och : Tyngdkraftens komposanter (med mätt nedåt från horisontell):
- -riktning: (utåt, positiv för )
- -riktning: (i rörelseriktningen)
NII i : Negativt tecken kraften från axeln pekar mot (håller upp halvklotet).
NII i : Negativt tecken kraften verkar mot rörelseriktningen — axeln bromsar cm:s tangentiella acceleration så att endast tyngdens moment driver rotationen.
Rimlighetskoll vid Vid lägsta läget pekar rakt nedåt och halvklotet passerar med max . Förväntan: (endast centripetal kraft behövs) och stor och uppåt.
Insatt: ✓ och (uppåt, mot ) ✓.
Läsning
- 9.4 Energy in Rotational Motion
- 9.5 Parallel-Axis Theorem
- 9.6 Moment-of-Inertia Calculations
- M 6.1 Tröghetsradie
- M 6.2 Sammansatta kroppar
- M 6.3 Tunna skivor
- Fysika: Tf-tabellen för standardkroppar
Se även
Resurser
- Khan Academy: Moment of inertia — bygger upp via samma summa över bitar.
- Wikipedia: List of moments of inertia — referenstabell när Fysika inte räcker till.
- MIT OCW 8.01: Lecture 21 — Walter Lewin gör en klassisk demonstration av Exempel-A-typ.