---
kurs:
- M0067M
tags:
- linjär-algebra
- matris
förkunskaper:
- "[[Matriser]]"
status: true
aliases:
- Linjärt ekvationssystem
- System of linear equations
- Gaussian elimination
- Trappstegsform
- Reducerad trappstegsform
---
## Linjära ekvationssystem
| Antal obekanta | Linjära ekvation | Linjärt utryck |
| -------------- | ---------------- | -------------- |
| 1 | $3x=5 \Longleftrightarrow x=\frac{5}{3}$ | $3x$ |
| 2 | $3x+5=2y$ | $5x-y$ |
| 3 | $8x+2y-z=0$ | $8x+2y-z$ |
| $x_{1},\dots,x_{n}$ obekanta | $a_{1}x_{1}+a_{2}x_{2}+\dots+a_{n}x_{n}=b$ | $a_{1}x_{1}+a_{2}x_{2}+\dots+a_{n}x_{n}$ |
$(a_{1},\dots,a_{n},b$ är givna reella tal)
---
### Sats för linjära ekvationssystem
**Antalet lösningar är alltid $0$, $1$, eller $\infty$**
> [!example]- En lösning — linjerna skär varandra
> ```functionplot
> ---
> title: Linjärt ekvationssystem
> xLabel: x
> yLabel: y
> bounds: [-2, 6, -2, 6]
> grid: true
> ---
> f(x) = (7 - 2x) / 3
> g(x) = x - 1
> ```
> [!example]- Ingen lösning — parallella linjer
> ```functionplot
> ---
> title: Parallella linjer
> xLabel: x
> yLabel: y
> bounds: [-2, 6, -1, 5]
> grid: true
> ---
> f(x) = -x + 3
> g(x) = -x + 1
> ```
> [!example]- Oändligt många lösningar — samma linje
> ```functionplot
> ---
> title: Samma linje
> xLabel: x
> yLabel: y
> bounds: [-2, 6, -1, 5]
> grid: true
> ---
> f(x) = -x + 3
> g(x) = -x + 3
> ```
---
### Geometrisk tolkning
I ett system av linjära ekvationer är lösningen de punkter som uppfyller **alla** ekvationer — dvs. skärningarna.
| Antal ekvationer | Obekanta | Geometri | Lösning |
|------------------|----------|----------|---------|
| 2 | 2 | Linjer i planet | Punkt (eller linje/tom) |
| 2 | 3 | Plan i rummet | Linje |
| 3 | 3 | Plan i rummet | Punkt |
 2 plan → skärning är en linje
2 plan → skärning är en linje
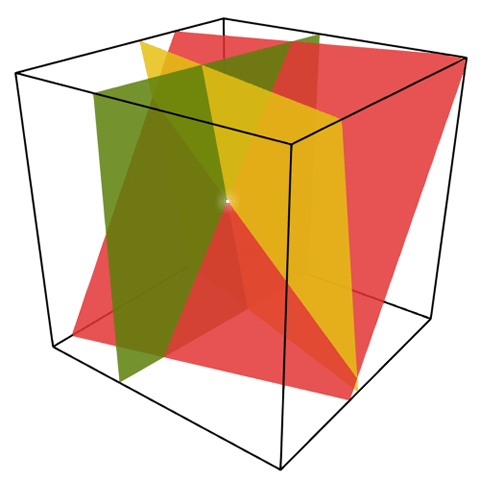 3 plan → skärning är en punkt
3 plan → skärning är en punkt
---
### Homogena system
Ett linjärt ekvationssystem är **homogent** om högerledet är noll i alla ekvationer:
$$
\begin{cases}
a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n = 0 \\
a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n = 0 \\
\vdots \\
a_{m1}x_1 + a_{m2}x_2 + \cdots + a_{mn}x_n = 0
\end{cases}
$$
**Egenskaper:**
- Har alltid minst den **triviala lösningen**: $x_1 = x_2 = \cdots = x_n = 0$
- Om fria variabler finns → oändligt många lösningar
- Homogena system har **aldrig** exakt noll lösningar
> [!note] Observation
> Ett homogent system med fler obekanta än ekvationer har alltid oändligt många lösningar (icke-triviala lösningar finns).
---
### Klammernotation
Denna notation är vanlig:
$$
\begin{cases}
2x + 3y = 7 \\
x - y = 1
\end{cases}
$$
Men det finns effektivare notation: **matriser**. Syftet med matrisform är att det gör det möjligt (lättare) att tillämpa [[Linjära ekvationssystem]].
---
### Från klammernotation till matrisnotation
Ett linjärt ekvationssystem kan skrivas om till **utökad koefficientmatris**:
$$
\begin{cases}
2x + 3y = 7 \\
x - y = 1
\end{cases}
\quad \Longrightarrow \quad
\begin{bmatrix}
2 & 3 & | & 7 \\
1 & -1 & | & 1
\end{bmatrix}
$$
### Tillvägagångssätt
1. **Koefficienter** till vänster om strecket
2. **Högerled** ($b$-värden) till höger om strecket
3. Varje **rad** motsvarar en ekvation
4. Varje **kolonn** (före strecket) motsvarar en obekant
---
### Exempel med tre obekanta
$$
\begin{cases}
x + y + 2z = 9 \\
2x + 4y - 3z = 1 \\
3x + 6y - 5z = 0
\end{cases}
\quad \Longrightarrow \quad
\begin{bmatrix}
1 & 1 & 2 & | & 9 \\
2 & 4 & -3 & | & 1 \\
3 & 6 & -5 & | & 0
\end{bmatrix}
$$
---
### Allmänt
$$
\begin{cases}
a_{11}x_{1}+a_{12}x_{2}+\dots+a_{1n}x_{n}=b_{1} \\
a_{21}x_{1}+a_{22}x_{2}+\dots+a_{2n}x_{n}=b_{2} \\
\vdots \\
a_{m1}x_{1}+a_{m2}x_{2}+\dots+a_{mn}x_{n}=b_{m}
\end{cases}
$$
$$
\Longrightarrow \quad
\begin{bmatrix}
a_{11} & a_{12} & \cdots & a_{1n} & | & b_{1} \\
a_{21} & a_{22} & \cdots & a_{2n} & | & b_{2} \\
\vdots & \vdots & \ddots & \vdots & | & \vdots \\
a_{m1} & a_{m2} & \cdots & a_{mn} & | & b_{m}
\end{bmatrix}
$$
---
### Lösningsfall vid Gausselimination
| Fall | Kännetecken | Antal lösningar |
| -------------- | ----------------------------------------------- | ------------------ |
| Ingen lösning | Rad: $[0 \quad 0 \quad \cdots \quad 0 \quad b]$ | $b$ där $b \neq 0$ |
| Unik lösning | Lika många pivoter som obekanta | $1$ |
| Oändligt många | Fria variabler finns (och konsistent) | $\infty$ |
---
## Se även
- [[Linjära ekvationssystem]]
- [[Matriser]]
---
## Resurser
- [3Blue1Brown: Inverse matrices, column space and null space (kap 7)](https://youtu.be/uQhTuRlWMxw)
GeoGebra: System of Linear Equations — grafisk lösning av 2×2-system
- [matrixcalc.org](https://matrixcalc.org/) — lös system online
- [Wikipedia: System of linear equations](https://en.wikipedia.org/wiki/System_of_linear_equations)
---
## Gausselimination
---
## 1. Bundna och fria variabler
> [3B1B: Inverse matrices, column space, null space](https://youtu.be/uQhTuRlWMxw)
Om lösning finns för alla värden av en variabel $t$ så är $t$ en **fri** variabel, medan resten är **bundna**.
> [!example]- Exempel: Lösningen $(5-t, 2-t, t)$
> Här är $t$ fri variabel.
>
> Om man får en ekvation där t.ex. $0 = 1$ saknas lösning (inkonsistent system).
---
## 2. Pivotelement
**Definition:** Det första nollskilda elementet på en rad kallas **pivotelement**. Om det är en etta kallas det en **ledande etta**.
I en matris markeras pivotelementet ofta med en ruta:
$$
[\boxed{1} \quad 1 \quad -3 \quad | \quad 4]
$$
### Från ekvation till lösning
Givet $x + y + 3z = 4$ med $x$ som pivotkolumn:
Sätt $z = s$, $y = t$ (fria variabler):
$$
x = 4 - y - 3z = 4 - t - 3s
$$
Lösningen:
$$
(x, y, z) = (4 - t - 3s, t, s) = (4, 0, 0) + t(-1, 1, 0) + s(-3, 0, 1)
$$
---
## 3. Trappstegsform (Echelon Form)
En matris är på **trappstegsform** om:
1. Nollraderna är samlade längst ned
2. Pivotelement i en rad är alltid till höger om pivotelementet i raden ovanför
> [!example]- Exempel på trappstegsform
>
> Pivotelementet markeras med ruta:
> $$
> \begin{bmatrix}
> \boxed{1} & 2 & 5 & 2 & 2 & | & * \\
> 0 & \boxed{1} & 3 & 6 & 2 & | & * \\
> 0 & 0 & \boxed{1} & 2 & 5 & | & * \\
> 0 & 0 & 0 & 0 & \boxed{1} & | & *
> \end{bmatrix}
> $$
---
## 4. Reducerad trappstegsform (Reduced Row Echelon Form)
En matris är på **reducerad trappstegsform** om:
1. Den är på trappstegsform
2. Alla pivoter är ettor
3. Varje pivot är det enda nollskilda elementet i sin kolumn
> [!example]- Exempel på reducerad trappstegsform
>
> $$
> \begin{bmatrix}
> \boxed{1} & 0 & 5 & 2 & 0 & | & * \\
> 0 & \boxed{1} & 0 & 6 & 0 & | & * \\
> 0 & 0 & \boxed{1} & 2 & 0 & | & * \\
> 0 & 0 & 0 & 0 & \boxed{1} & | & *
> \end{bmatrix}
> $$
### Sats
Varje matris är radekvivalent med minst en matris på trappstegsform och med **precis en** på reducerad trappstegsform.
---
## 5. Gausselimination — Exempel
> [interaktiv GeoGebra](https://www.geogebra.org/m/NKmdvfuz)
> [!example]- Reducera till trappstegsform
>
> **Startmatris:**
> $$
> \begin{bmatrix}
> 0 & -3 & -6 & 4 & | & 9 \\
> -1 & -2 & -1 & 3 & | & 1 \\
> -2 & -3 & 0 & 3 & | & -1 \\
> 1 & 4 & 5 & -9 & | & -7
> \end{bmatrix}
> $$
>
> **Steg 1:** Byt $R_1 \leftrightarrow R_4$ för att få pivotelement i första kolumnen:
> $$
> \begin{bmatrix}
> 1 & 4 & 5 & -9 & | & -7 \\
> -1 & -2 & -1 & 3 & | & 1 \\
> -2 & -3 & 0 & 3 & | & -1 \\
> 0 & -3 & -6 & 4 & | & 9
> \end{bmatrix}
> $$
>
> **Steg 2:** $R_1 + R_2 \to R_2$ och $2R_1 + R_3 \to R_3$:
> $$
> \begin{bmatrix}
> 1 & 4 & 5 & -9 & | & -7 \\
> 0 & \boxed{2} & 4 & -6 & | & -6 \\
> 0 & 5 & 10 & -15 & | & -15 \\
> 0 & -3 & -6 & 4 & | & 9
> \end{bmatrix}
> $$
>
> Fortsätt eliminera under pivoten i kolumn 2...
>
> **Resultat:** Variablerna som tillhör pivotkolumner är **bundna**, resten är **fria**.
---
## 6. Tolka lösningen
| Variabeltyp | Beskrivning |
|-------------|-------------|
| **Bunden** | Tillhör en pivotkolumn, bestämd av de fria |
| **Fri** | Kan sättas till valfritt värde ($s, t, u, \ldots$) |
> [!example]- Exempel: Parametriserad lösning
>
> Om $x$ är bunden och $y, z$ är fria med $y = s$, $z = t$:
> $$
> x = -2 - 2s - 3t
> $$
>
> Lösningen på vektorform:
> $$
> (x, y, z) = (-2, 0, 0) + s(-2, 1, 0) + t(-3, 0, 1)
> $$
### Notation för fria variabler
Sätt fria variabler som: $s, t, u, v, \ldots$
---
## 7. Homogena system
Om högerledet är noll i alla ekvationer i ett linjärt ekvationssystem är det **homogent**.
Då är alltid $\vec{x} = \vec{0}$ (triviala lösningen) en lösning:
$$
x_1 = 0, \quad x_2 = 0, \quad \ldots, \quad x_n = 0
$$
---
## 8. Ekvationssystem med parameter
> [interaktiv kalkylator](https://matrixcalc.org/slu.html)
> [!example]- Lös systemet beroende på parametern $a$
>
> **Startmatris:**
> $$
> \begin{bmatrix}
> \boxed{1} & 1 & 1 & | & 1 \\
> 1 & a^2 & 1 & | & a \\
> 1 & 2 & 0 & | & -1
> \end{bmatrix}
> $$
>
> **Steg 1:** $R_1 \cdot (-1) + R_2 \to R_2$ och $R_1 \cdot (-1) + R_3 \to R_3$:
> $$
> \begin{bmatrix}
> 1 & 1 & 1 & | & 1 \\
> 0 & a^2-1 & 0 & | & a-1 \\
> 0 & 1 & -1 & | & -2
> \end{bmatrix}
> $$
>
> **Steg 2:** Byt $R_2 \leftrightarrow R_3$:
> $$
> \begin{bmatrix}
> 1 & 1 & 1 & | & 1 \\
> 0 & 1 & -1 & | & -2 \\
> 0 & a^2-1 & 0 & | & a-1
> \end{bmatrix}
> $$
>
> **Steg 3:** $R_2 \cdot (-(a^2-1)) + R_3 \to R_3$:
> $$
> \begin{bmatrix}
> 1 & 1 & 1 & | & 1 \\
> 0 & 1 & -1 & | & -2 \\
> 0 & 0 & a^2-1 & | & (a-1) + 2(a^2-1)
> \end{bmatrix}
> $$
>
> **Fallanalys:** Antalet pivoter beror på om $a^2 - 1 = 0$
>
> ---
>
> **Fall 1:** $a^2 - 1 \neq 0$ (dvs. $a \neq \pm 1$)
>
> Tre pivoter $\Rightarrow$ $x, y, z$ bundna (en unik lösning):
> $$
> z = \frac{(a-1) + 2(a^2-1)}{a^2-1} = \frac{2a+3}{a+1}
> $$
>
> **Fall 2:** $a = 1$
>
> Analysera separat...
>
> **Fall 3:** $a = -1$
>
> Analysera separat...
---
## Resurser
### Videor
- [3Blue1Brown: Inverse matrices, column space and null space (kap 7)](https://youtu.be/uQhTuRlWMxw) — visar sambandet mellan pivoter, fria variabler och [[Kolonnrum, radrum och nollrum|nollrum]]
- [3Blue1Brown: Nonsquare matrices (kap 8)](https://youtu.be/v8VSDg_WQlA) — hur rader/kolumner påverkar lösningsrummet
- [MIT 18.06: Lecture 2 — Elimination with Matrices](https://ocw.mit.edu/courses/18-06-linear-algebra-spring-2010/resources/lecture-2-elimination-with-matrices/) — Gilbert Strangs klassiska föreläsning
### Interaktiva verktyg
- [eMathHelp: Gauss-Jordan Calculator](https://www.emathhelp.net/calculators/linear-algebra/gauss-jordan-elimination-calculator/) — beräkna med visade steg
- [matrixcalc.org: System of Linear Equations](https://matrixcalc.org/slu.html)
### Wikipedia
- [Gaussian elimination](https://en.wikipedia.org/wiki/Gaussian_elimination)
- [Row echelon form](https://en.wikipedia.org/wiki/Row_echelon_form)
### Fördjupning
- [Immersive Linear Algebra — Chapter 6: The Matrix](https://immersivemath.com/ila/ch06_matrices/ch06.html) — interaktiv 3D-bok
- [Georgia Tech: Interactive Linear Algebra](https://textbooks.math.gatech.edu/ila/) — fri interaktiv lärobok